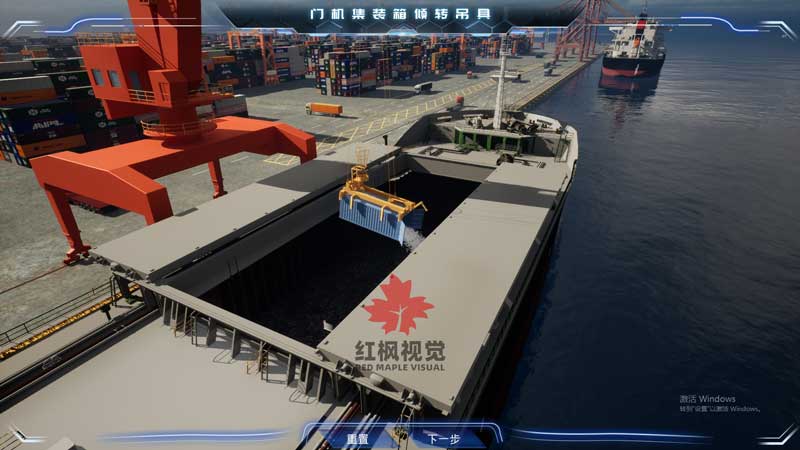
数字孪生系统是一种集成了物理模型、传感器数据、机器学习等技术的先进系统,旨在通过创建一个与现实世界相对应的虚拟模型,实现对复杂工程过程的模拟和分析。在港口作业领域,门机集装箱倾转数字孪生系统提供了一个高度仿真的门机操作环境,能够详细展示集装箱的抓取和倾倒过程。
该系统通过动画形式,将门机的集装箱倾转过程分解为抓取和倾倒等关键步骤,为用户提供了一个直观的演示平台。用户可以通过系统界面,实时观察门机的作业流程,以及集装箱在不同阶段的状态变化,从而更好地理解和掌握整个集装箱倾转作业的流程。
三维模型场景是数字孪生系统的核心组成部分,它为用户提供了一个逼真的虚拟港口环境:
港口模型:模拟了港口的地理环境和基础设施,包括码头、堆场、装卸区等,为集装箱倾转作业提供了一个真实的背景。

门机模型:精确再现了门机的物理结构和运动特性,包括起重机械、抓斗、控制系统等部分,确保了模型的高仿真度。

车辆模型:展示了集装箱运输车辆的外形和尺寸,以及它们在集装箱倾转过程中的移动和定位。

这些模型通过高级的三维图形技术构建,不仅在视觉上达到了高度逼真的效果,而且在物理特性上也能够精确模拟真实门机的行为。
集装箱倾转过程展示:系统能够展示门机抓取集装箱并进行倾倒的整个流程,包括集装箱的移动轨迹、倾转角度和货物的流动状态。
与现实模型动作实时同步:系统能够与实际门机模型的动作进行实时同步,确保虚拟环境中的演示与现实世界的作业完全一致。